Embedded Series
Liquid Lens


Liquid Lens
Measuring Inner Wall Lens
Measuring Outer Wall Lens
Multi-angle Lens
Oblique Lens
High Performance Internal Coaxial Telecentric Lens



















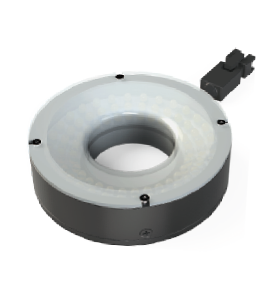
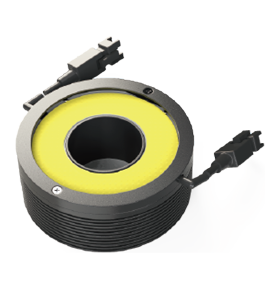
Ring Light
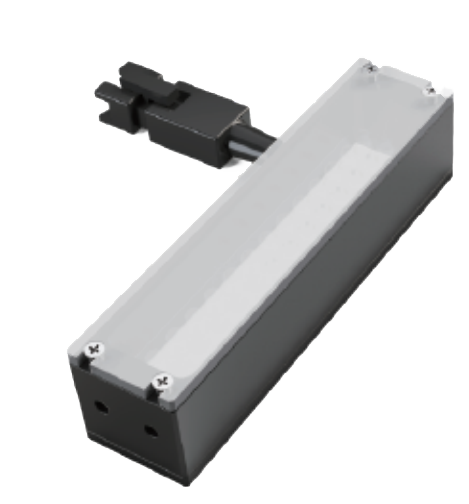
Bar Light
Coaxial Light
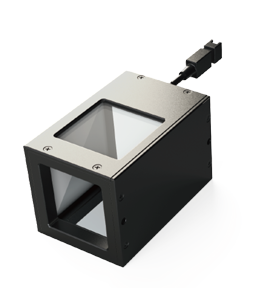
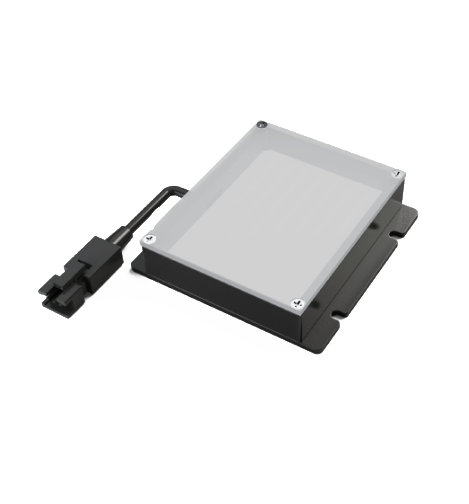
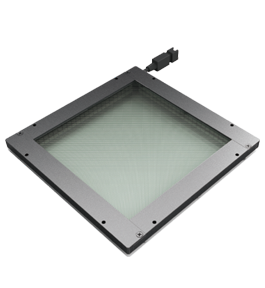
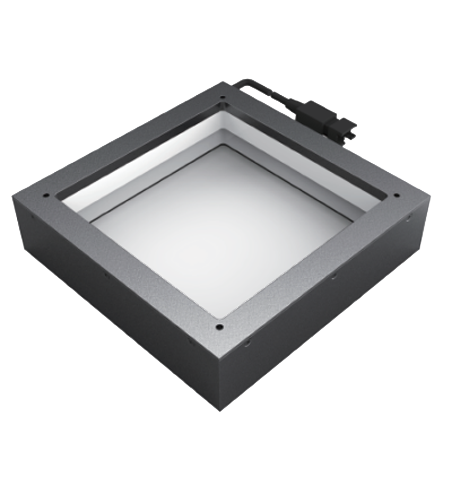
Back Light
Dome Light
Telecentric Light
Spot Light
Parallel Focus Light
High Bright Line Light
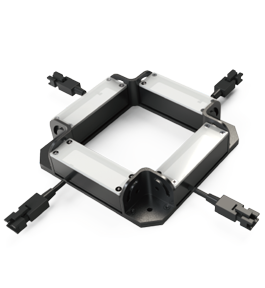
Plane Shadowless Light
Square Shadowless Light
Needle Inspection Light
Arch-shaped Light
Structural Light


























Scan the code to enter the product selection mini-program.



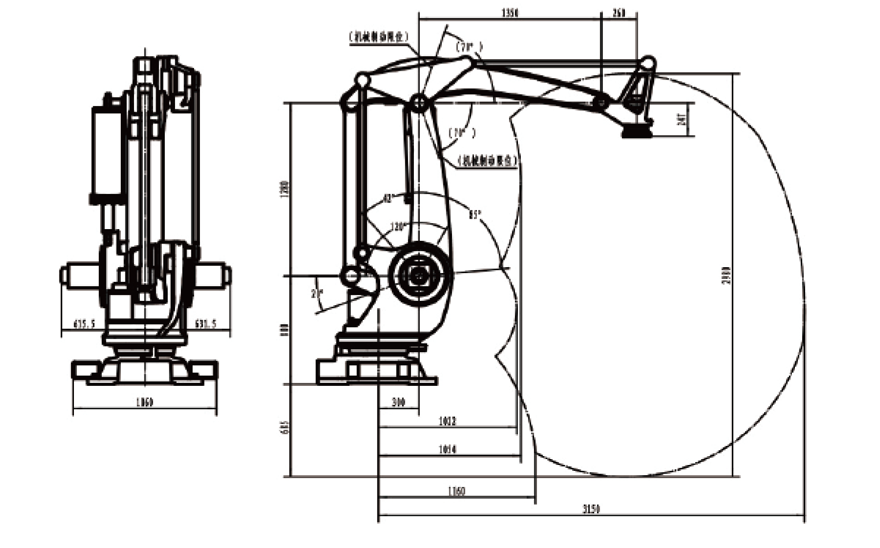
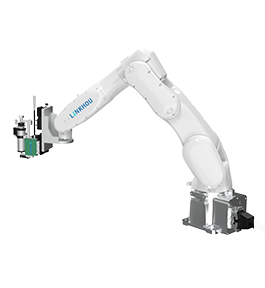
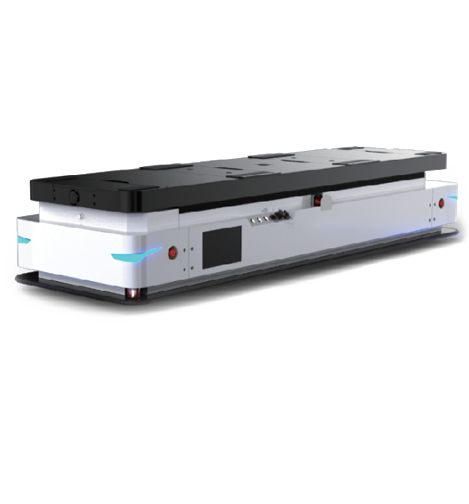
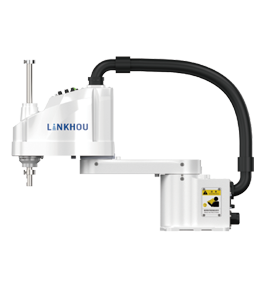
The robot is designed as a four-axis robot. Its body structure is simple, with low cost, long reach and a wide working range.
The double parallelogram mechanism is utilized as the transmission mechanism to achieve the pitching motion of the robot's wrist.
Convenient manufacturing.
Download

Load
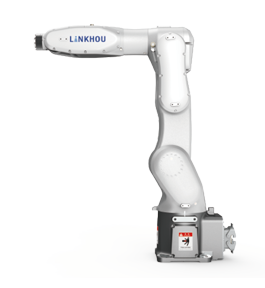
180kgArm length
3150mmRepeatability
±0.1mm| Product model | LR180E-R3150-4 | |
| Structural type | Vertical multi-joint type | |
| Number of joint axes | 4 | |
| Maximum operating radius | 3150mm | |
| Load | 180kg | |
| Repeatability | ±0.1mm | |
| Rated load speed | J1 | 130°/s |
| J2 | 130°/s | |
| J3 | 130°/s | |
| J4 | 300°/s | |
| range of motion | J1 | ±180° |
| J2 | -85°/+42° | |
| J3 | -120/+20° | |
| J4 | ±300° | |
| Maximum allowable torque | J4 | 234.6N.m |
| Allowable moment of inertia | J4 | 250kg·m² |
| Installation environment | Degree of protection | IP54 |
| temperature | 0°C-45°℃ 20-85%RH | |
| Vibration | 0.5G | |
| Others | Do not expose to corrosive or flammable gases and liquids. Keep away from electrical noise sources. | |
| Body weight | 1850KG | |
| Installation method | Ground installation | |