Embedded Series
Liquid Lens


Liquid Lens
Measuring Inner Wall Lens
Measuring Outer Wall Lens
Multi-angle Lens
Oblique Lens
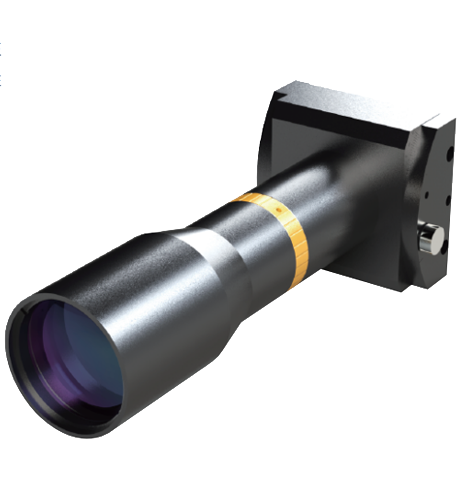
High Performance Internal Coaxial Telecentric Lens



















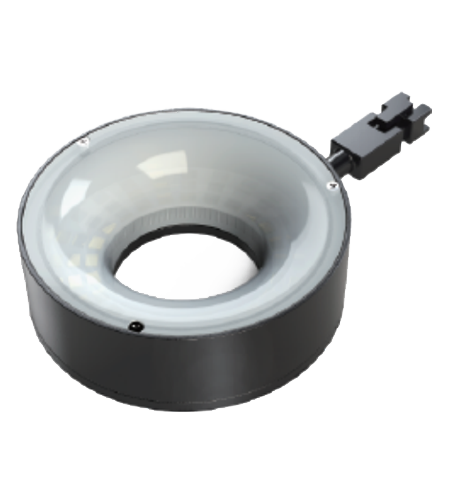
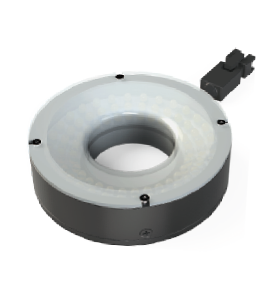
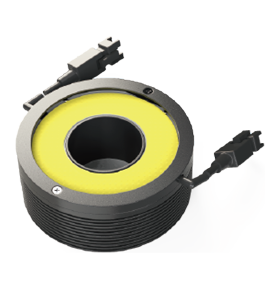
Ring Light
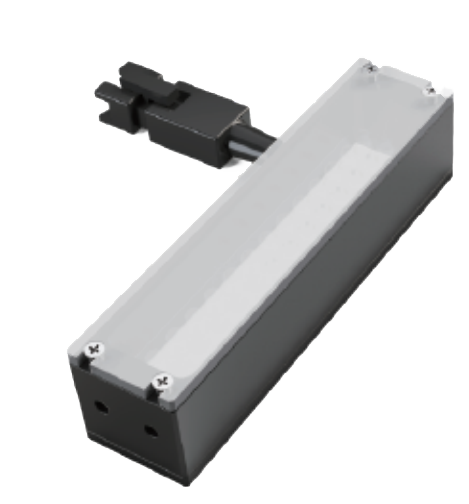
Bar Light
Coaxial Light
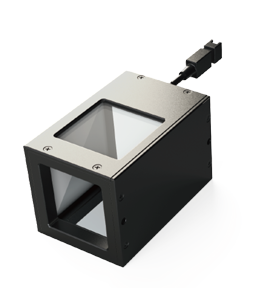
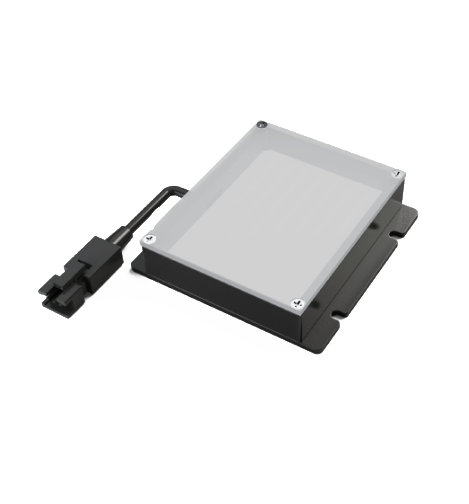
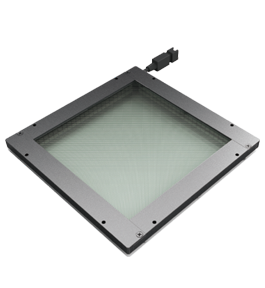
Back Light
Dome Light
Telecentric Light
Spot Light
Parallel Focus Light
High Bright Line Light
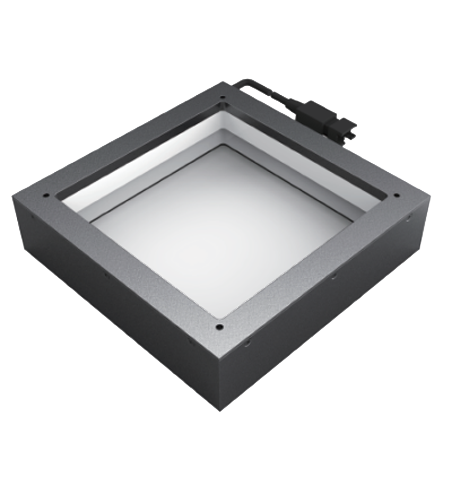
Plane Shadowless Light
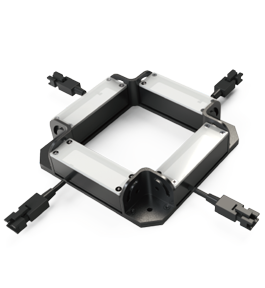
Square Shadowless Light
Needle Inspection Light
Arch-shaped Light
Structural Light


























Scan the code to enter the product selection mini-program.



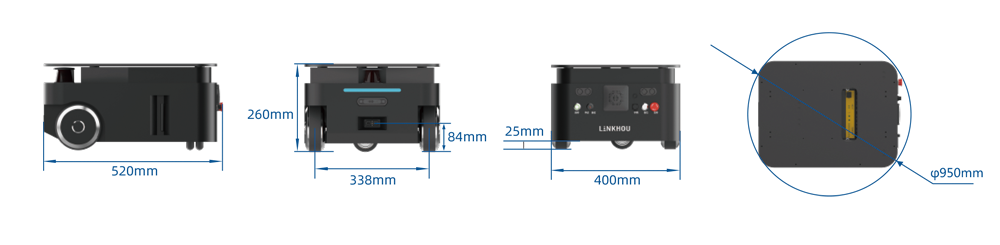
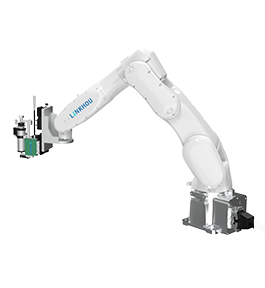
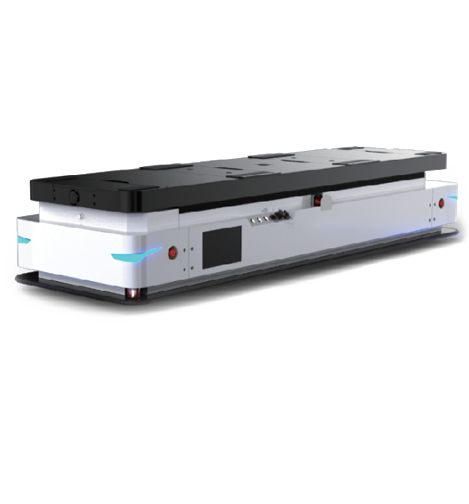
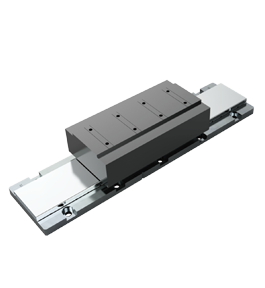
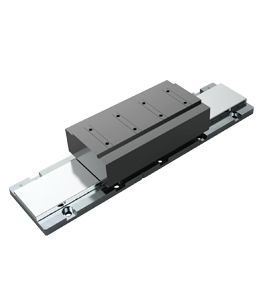
The TX-NEXT is specifically designed for lightweight general-purpose robots and achieves the ultimate in cost control. It adopts an integrated product structure design, with modular product components. It features efficient assembly and convenient maintenance.
Download

Weight
50kgVolume
520x400x260mmRated load
100kg| Main parameters | ||
| Basic parameters | SizeL*W*H | L520mm*W400*H260mm |
| Revolving diameter | 950mm | |
| basic functions | Move forward, move backward, turn (set the radius), rotate in place, (differential structure) | |
| Ground clearance of the chassis | 25mm | |
| Motor type | Walking servo hub motor | |
| weight | 50KG | |
| Rated load | 100kg | |
| Navigation method | 2D laser | |
| Laser detection | Front - side laser, rear - side ultrasonic; front 270° | |
| Safety performance | Visual obstacle avoidance | Front visual obstacle avoidance |
| Ultrasonic obstacle avoidance | Distributed at the rear, with a quantity of 2. | |
| Rated acceleration | 400mm/s2 | |
| speed | Rated at 1.5m/s, maximum 2.5m/s | |
| Climbing slope ° | 59 | |
| Seam width | 30mm | |
| Step-over height | 10mm | |
| Braking method | Electric motor braking | |
| Stop angle accuracy, stop position accuracy | ±1°/±0.5°(Secondary positioning of the reflector) | |
| Battery performance | Battery type | ±10mm/±5mm(Reflector Secondary Positioning) Lithium Iron Phosphate Battery |
| Battery rated voltage | 51.2v | |
| capacity | 15Ah | |
| Number of full charge and discharge cycles | After 2000 full charge - discharge cycles, the effective capacity is greater than 80%. | |
| Running time | Combined working conditions ≥ 6h | |
| Charging time | 1.5h | |
| Charging method | Auto charging/Manual charging | |
| Chassis control method | The upper controller sends coordinates to drive the chassis to move | Automatic mode |
| The upper controller sends the turning angle/speed to control the movement of the chassis. | Manual mode | |
| Control the chassis movement through the remote control | Manual mode | |