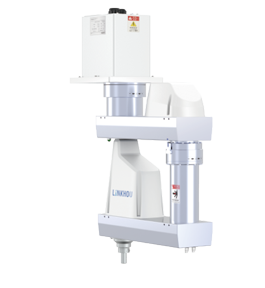
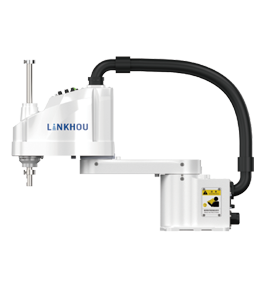
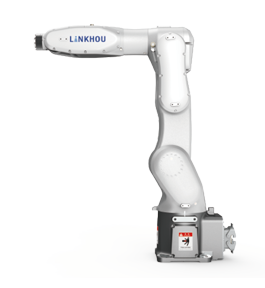
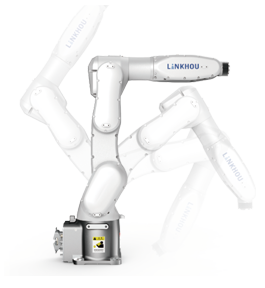
Embedded Series
Liquid Lens


Liquid Lens
Measuring Inner Wall Lens
Measuring Outer Wall Lens
Multi-angle Lens
Oblique Lens
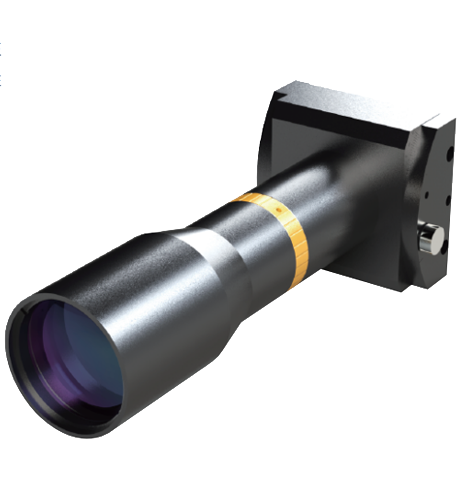
High Performance Internal Coaxial Telecentric Lens



















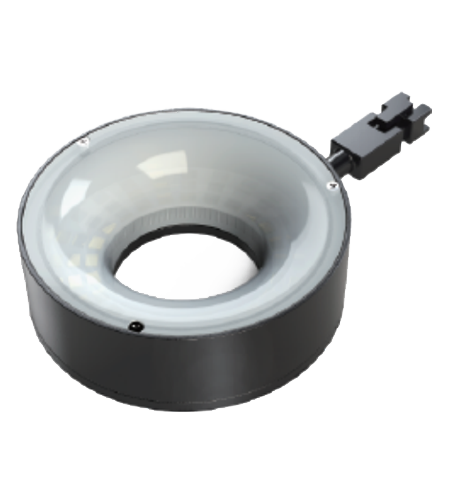
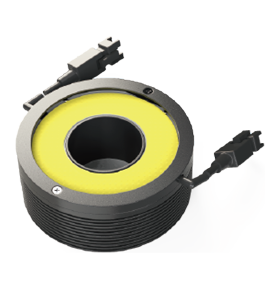
Ring Light
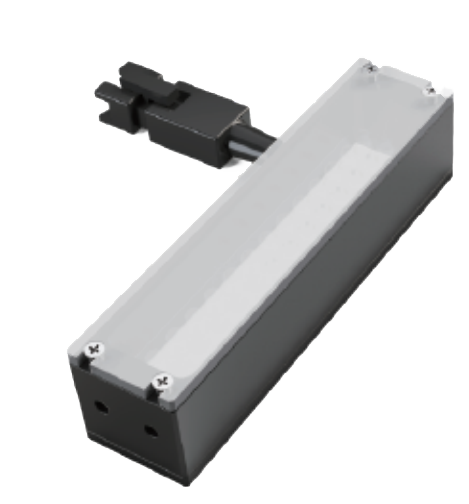
Bar Light
Coaxial Light
Back Light
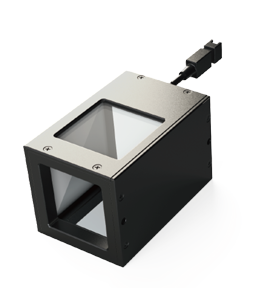
Dome Light
Telecentric Light
Spot Light
Parallel Focus Light
High Bright Line Light
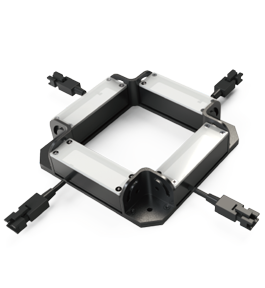
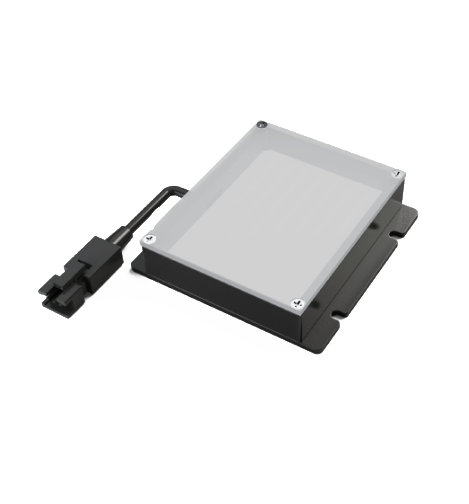
Plane Shadowless Light
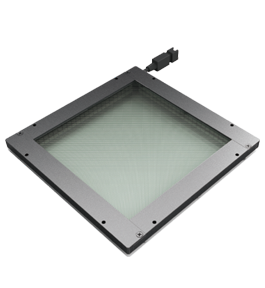
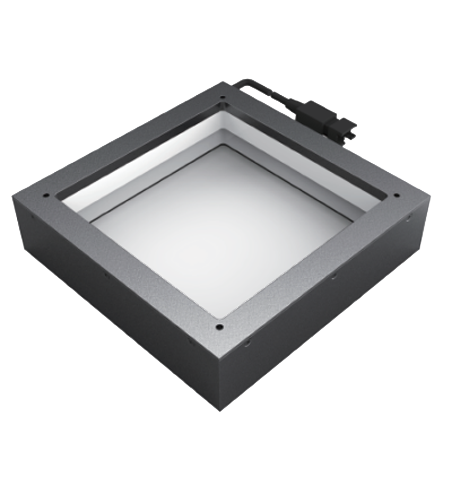
Square Shadowless Light
Needle Inspection Light
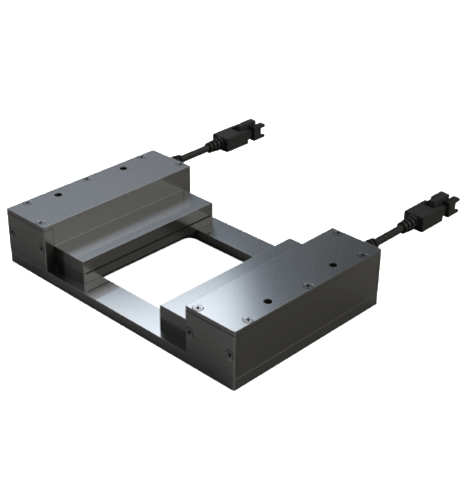
Arch-shaped Light
Structural Light


























Scan the code to enter the product selection mini-program.


Q&A
In the field of machine vision, the field of view refers to the size of the physical area that a camera system can "see" and image at a specific working distance. It is the result of the combined action of the camera lens and the sensor, representing the width and height of the actual scene that the camera can capture at one time on the target object plane (or the surface of the object being measured).
You can imagine it as a rectangular window (sometimes it may be circular or of other shapes, but rectangles are the most common) through which the camera "gazes" at the real world at that moment. The size of this window is the field of view.
Coverage: The FOV determines how large an area the camera can "see" at one time. You need to ensure that the selected FOV can fully cover the target object or area that you need to detect, measure, or identify.
Resolution and accuracy: The FOV is directly related to the resolution (total number of pixels) of the image sensor, jointly determining the spatial resolution or pixel accuracy.
Pixel accuracy = FOV (W or H) / Sensor resolution (W or H in pixels)
For example, if the FOV width is 100mm and the number of horizontal pixels of the sensor is 2000, then the physical size represented by each pixel is 100mm / 2000px = 0.05mm/px. This means that the minimum feature size that the system can theoretically distinguish is approximately 0.05mm (in practice, it is affected by factors such as the lens and illumination).
Key trade - offs: When the sensor resolution is fixed:
System Design: FOV is one of the core parameters in designing a machine vision system. You need to determine the required FOV based on the size of the detection object, the required accuracy, and the installation space limitation (working distance WD), and then select an appropriate lens focal length and sensor size. Lens Selection: Knowing the required FOV, WD, and sensor size, you can calculate the required lens focal length using the above formula.
Large field of view: Suitable for detecting large objects (such as car bodies, entire circuit boards for AOI), sorting logistics packages, scanning warehouse shelves, etc.
Small field of view: Suitable for detecting tiny features (such as chip pins, dimensions of precision parts, small surface defects), high-precision measurements, etc.