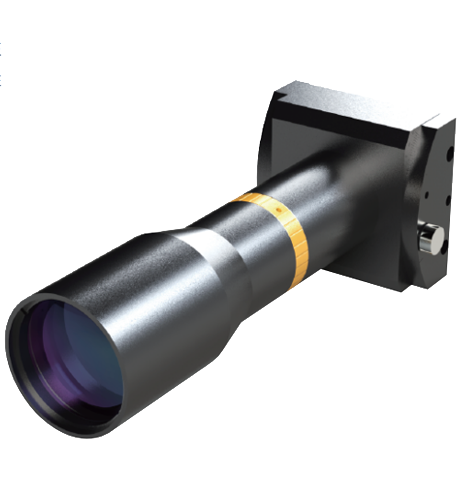
远心嵌入式系列
液态镜头













扫码进入选型小程序




查看详情
查看详情
查看详情
查看详情
查看详情
查看详情
查看详情
查看详情