远心嵌入式系列
液态镜头













扫码进入选型小程序



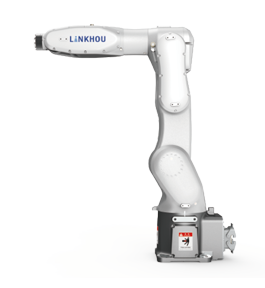
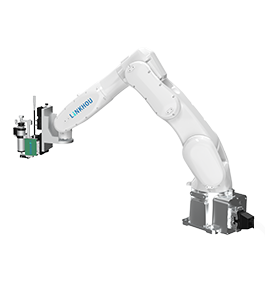
轻量化结构设计,减小机器人本体重量,保证机器人简单、可靠和高性能
行程与负载能力增大,有效应对不同工况下使用
高节拍,重复定位精度高,确保作业效率和质量
更高的防护等级,IS0Clss4标准,可满足3C、半导体行业无污染操作的要求
单独电池单元及减速机独立加注油孔,方便拆卸维护
资料下载

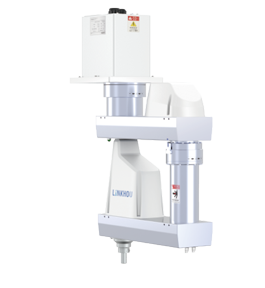
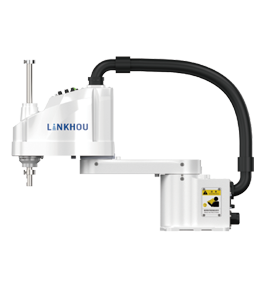
重复定位精度
±0.01mm最大臂展
700mm洁净等级
ISO Class 4标准循环时间
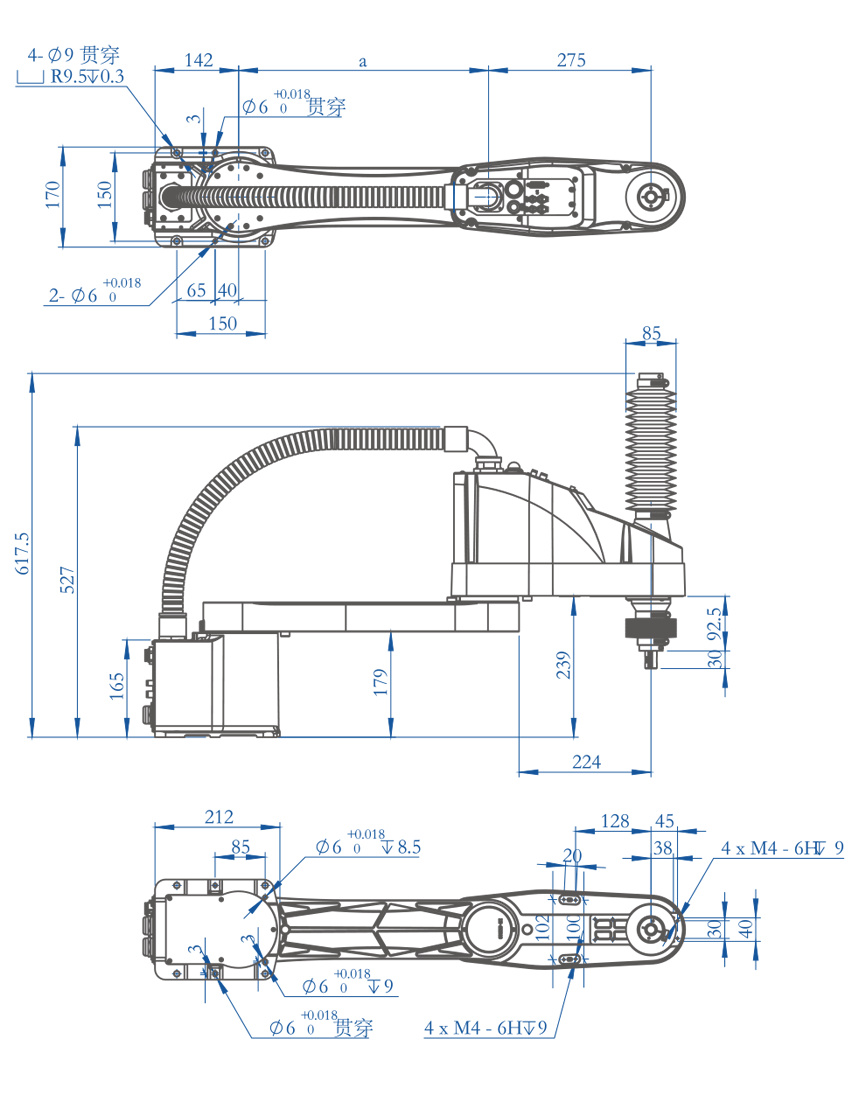
0.32s| 产品型号 | TM7-R500C/R600C/R700C | |||||
| 安装方式 | 台面安装 | |||||
| 曾长 | 第1+第2臂长 | 500 | 600 | 700 | ||
| 第1轴胃长 | 225 | 325 | 425 | |||
| 第2轴胃长 | 275 | |||||
| 本体重量(不含电缆) | 16kg | 16.5kg | ||||
| 重复定位精度 | 第1+第2关节 | 17kg ±0.02mm | ||||
| 第3关节 | ±0.01mm | |||||
| 第4关节 | ±0.01° | |||||
| 最大运动速度 | 第1+第2关节 | 7180mm/s 7930mm/s 8670mm/s | ||||
| 第3关节 | 100mm/s | |||||
| 第4关节 | 200/s | |||||
| 最大运动范围 | 第1关节 | 土1320 | ||||
| 第2关节 | ±1500 | |||||
| 第3关节 | 170mm | |||||
| 第4关节 | 土3600 | |||||
| 负敷 | 简定 | 3Kg | ||||
| 最大 | 7Kg | |||||
| 标准循环时间 | 0.32s 0.32s 0.327s | |||||
| 第四关节容许惯性力矩 | 额定 | 0.01Kg.m2 | ||||
| 最大 | 0.12Kg.m2 | |||||
| 洁净等级 | ISO Class 4 | |||||
| 环境湿度 | 5~40°℃(不应有较大变化) | |||||
| 用户电路 | 15针(D-Sub接口) | |||||
| 用户气路 | 44mm×2,中6mm×2 | |||||
| 第三关节顶压力 | 100N | |||||
| 原点复位 | 绝对原点 | |||||