远心嵌入式系列
液态镜头













扫码进入选型小程序



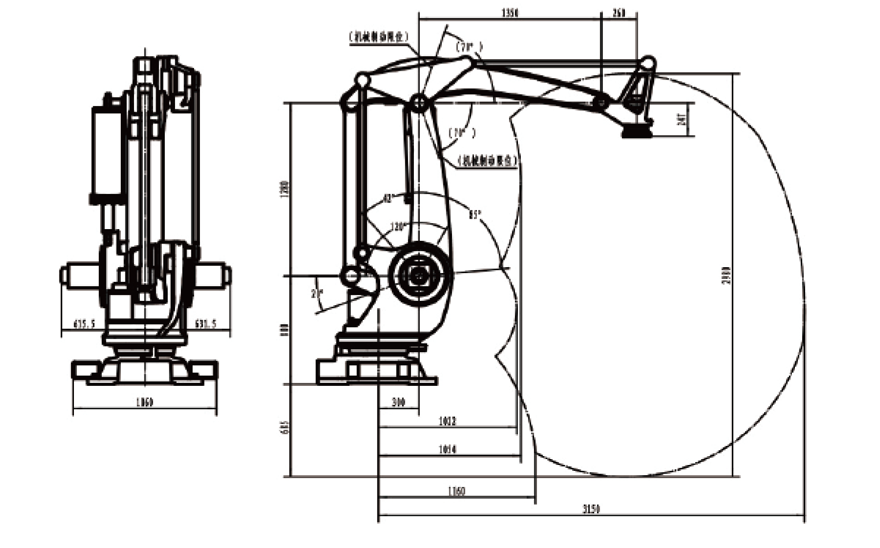
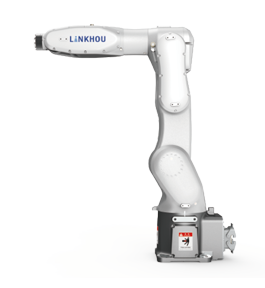
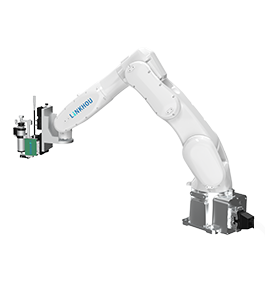
机器人设计为四轴机器人,本体结构简洁,成本低臂展长,工作范围广
利用双平行四边形机构作为传动机构,来实现机器人的腕部俯仰动作,方
便制造。
机器人2轴3轴并联,结构稳定、承载能力强、整体刚性大、重量轻。
资料下载

负载
180kg臂展
3150mm重复定位精度
±0.1mm关节数
3| 产品型号 | LR180E-R3150-4 | |
| 结构类型 | 垂直多关节型 | |
| 关节轴数 | 4 | |
| 最大活动半径 | 3150mm | |
| 手部最大负载 | 180kg | |
| 重复定位精度 | ±0.1mm | |
| 额定负载速度 | J1 | 130°/s |
| J2 | 130°/s | |
| J3 | 130°/s | |
| J4 | 300°/s | |
| 最大运动范围 | J1 | ±180° |
| J2 | -85°/+42° | |
| J3 | -120/+20° | |
| J4 | ±300° | |
| 最大容许扭矩 | J4 | 234.6N.m |
| 容许惯性力矩 | J4 | 250kg·m² |
| 防护等级 安装环境 | 本体IP54、手腕IP65 | |
| 温度 湿度 | 0°C-45°℃ 20-85%RH(无结露) | |
| 振动 | 0.5G以下 | |
| 其他 | 切勿有腐蚀性及引火性气体,液体,远离电气噪音源 | |
| 本体重量 | 1850KG | |
| 安装方式 | 地面 | |
| 上述参数均根据员猴实验标准测试所得。 | ||