远心嵌入式系列
液态镜头













扫码进入选型小程序



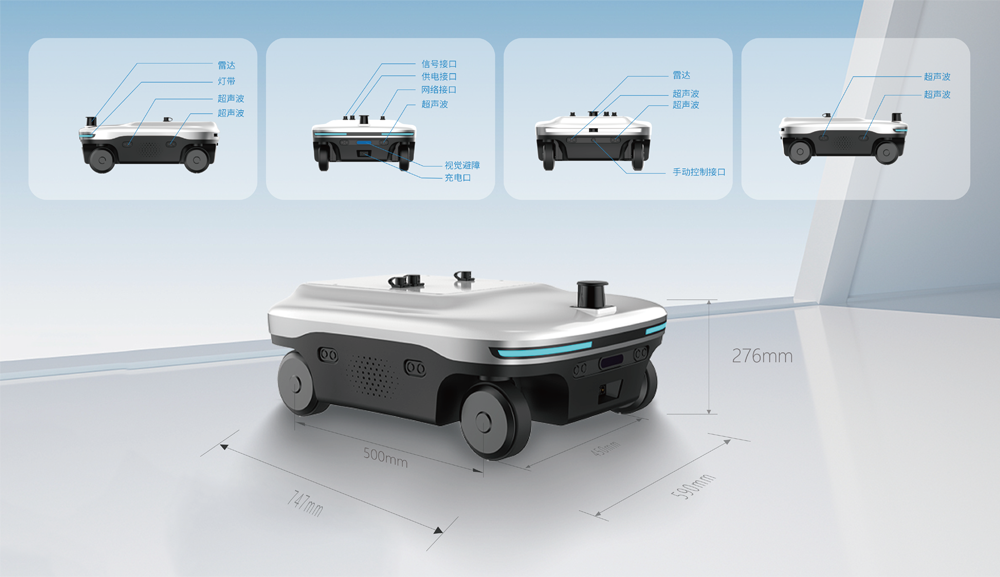
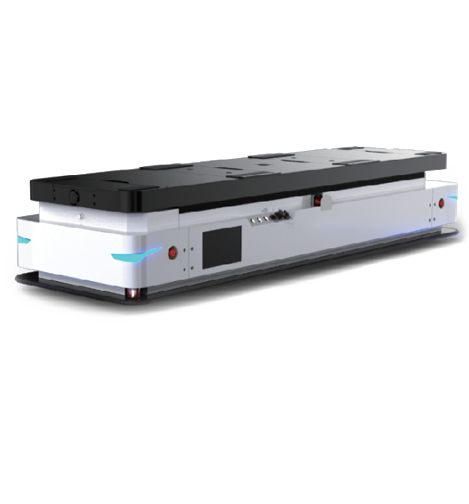
TX-S1轮式机器人模组采用四转四驱结构设计,配备紧凑型底盘布局,额定负载100kg,实现840mm回转直径。搭载全向移动系统,支持前进/后退、零半径转向、横向平移、斜向移动等多模态运动,适应狭窄空间与复杂路径场景。在软件上接入灵猴工业智能制造平台,高速与MES及百余种设备互通互联,多机协作,远程调度;适用多种环境,从软硬件升级提升产品柔性,满足不同场景下使用需求。
资料下载

额定负载
100kg速度
最大2m/s越阶高度
40mm回转直径
840mm| TX-S1 | ||
| 基本参数 | 外形尺寸L*W*H | L747mm*W590mm*H276mm |
| 回转直径 | 840mm | |
| 基本功能 | 前进、后退、转弯(设定半径)、原地旋转、横移(四转四驱) | |
| 底盘离地间隙 | 53mm | |
| 电机类型 | 行走伺服轮毂电机,旋转为关节模组 | |
| 自重 | 70KG | |
| 额定负载 | 100kg | |
| 安全性能 | 导航方式 | 2D激光/可选配3D激光 |
| 激光检测 | 前后激光,前270°,后180° | |
| 视觉避障 | 前置视觉避障 | |
| 超声波避障 | 分布前/后/左/右,各2个,共8个 | |
| 运动性能 | 额定加速度 | 400mm/s² |
| 速度 | 额定1.5m/s 最大2.5m/s | |
| 爬坡° | 10° | |
| 越缝宽度 | 40mm | |
| 越阶高度 | 40mm | |
| 制动方式 | 电机制动 | |
| 停止角度精度 | ±1° (巡线模式) | |
| 停止位置精度 | ±10mm (巡线模式) | |
| 电池性能 | 电池类型 | 磷酸铁锂电池 |
| 电池额定电压 | 51.2v | |
| 容 量 | 30AH | |
| 全充全放循环次数 | 完全充放电2000次,有效容量大于80% | |
| 运行时间 | 综合工况≥8h | |
| 充电时间 | 完全放电后充电时长≤1.5h | |
| 充电方式 | 自动充电/手动充电 | |
| 控制方式 | 上层控制器发送坐标驱动底盘移动 | 自动模式 |
| 上层控制器发送转角/速度控制底盘移动 | 手动模式 | |
| 通过遥控器控制底盘移动 | 手动模式 | |