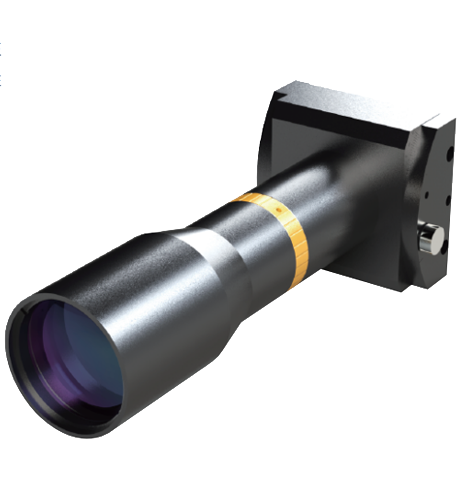
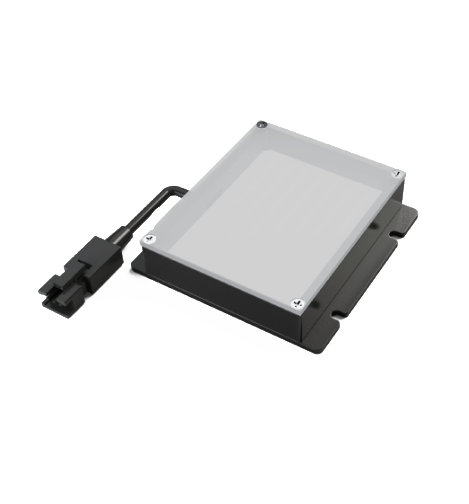
远心嵌入式系列
液态镜头













扫码进入选型小程序



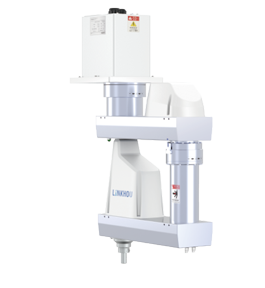
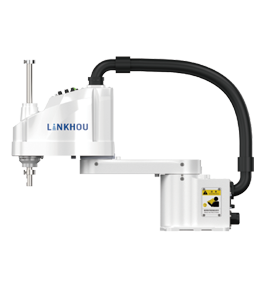
具有独特的回转结构设计,可实现超高自由度的运动
有限空间内生产率最大化
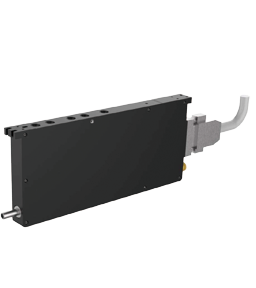
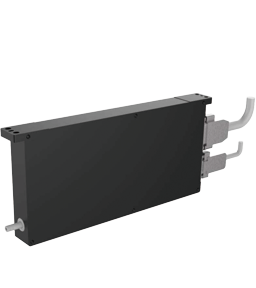
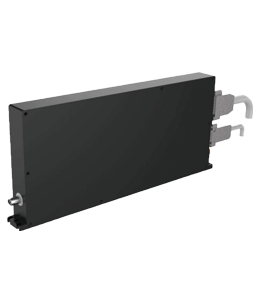
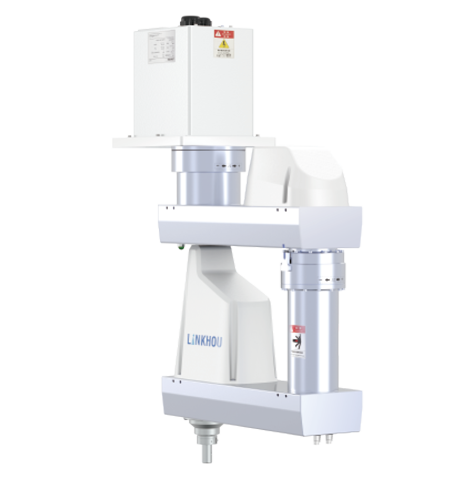
吊装结构和回转手臂,可从任何方向抓取工件
单独电池单元及减速机独立加注油孔,方便拆卸维护
可拆卸连接控制柜与本体的线缆模块,方便搬运与组装
资料下载
最大负载
5kg臂展范围
350/450/550/650mm标准循环时间
0.326s重复定位精度
±0.02mm
|
产品型号 |
ST4-R350/ST5-R450/ST5-R550/ST5-R650 | |||||
| 安装方式 | 吊顶安装 | |||||
| 臀长 | 第1+第2臂长 | 350 | 450 | 550 | 650 | |
| 第1轴臂长 | 175 | 225 | 275 | 325 | ||
| 第2轴臂长 | 175 | 225 | 275 | 275 | ||
| 本体重量(不含电缆) | 18kg | 19kg | 20kg | 21kg | ||
| 重复定位精度 | 第1+第2关节 | ±0.01mm | ±0.015mm | ±0.015mm | ±0.02mm | |
| 第3关节 | ±0.01mm | |||||
| 第4关节 | ±0.01° | |||||
| 最大运动速度 | 第1+第2关节 | 6237mm/s | 6085mm/s | 7400mm/s | 8789mm/s | |
| 第3关节 | 1100mm/s | |||||
| 第4关节 | 2600/s | |||||
| 最大运动范围 | 第1关节 | ±2250 | ||||
| 第2关节 | 土2250 | |||||
| 第3关节 | 150mm | |||||
| 第4关节 | ±7200 | |||||
| 负载 | 额定 | 2Kg | ||||
| 最大 | 4kg | 5kg | 5kg | 5kg | ||
| 标准循环时间 | 0.326s | 0.40s | 0.343s | 0.36s | ||
| 第四关节容许惯性力矩 | 额定 | 0.005Kg.m² | ||||
| 环境温度 | 最大 | 0.05Kg.m² | ||||
| 5~40°℃(不应有较大变化) | ||||||
| 用户电路 | 15针(D-Sub接口) | |||||
| 用户气路 | Φ4mm×2,46mm X2 | |||||
| 第三关节顶压力 | 150N | |||||
| 原点复位 | 绝对原点 | |||||
| 上述参数均根据灵猴实验标准测试所得。 | ||||||