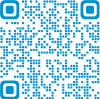
远心嵌入式系列
液态镜头













扫码进入选型小程序


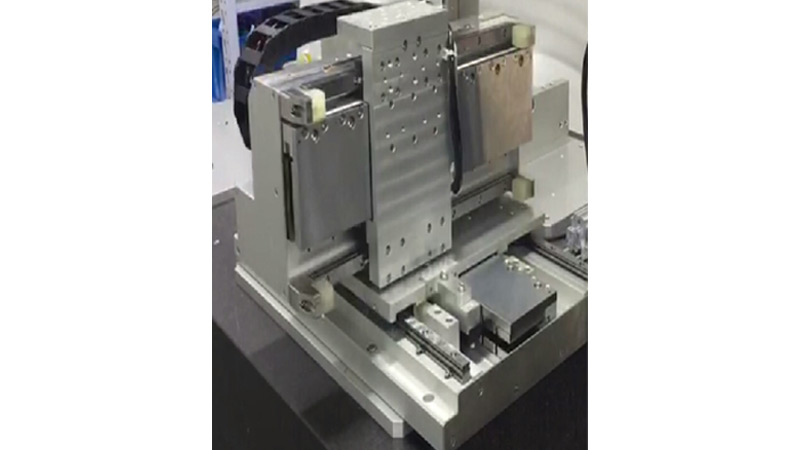
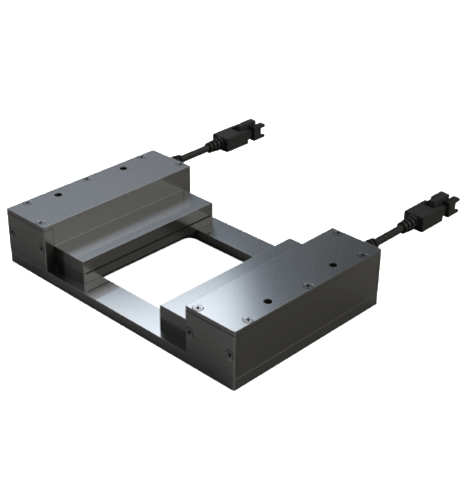
非线性运动轨迹,最小圆弧角R=0.3mm 运行速度100mm/s,全程匀速 加速度≥3.5g 速度波动≤±8mm/s 直线及圆弧轨迹误差:±30μm
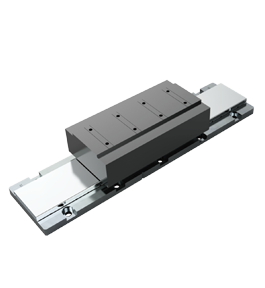
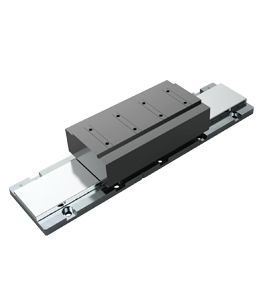
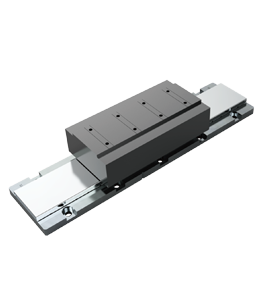
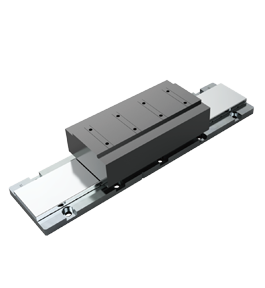
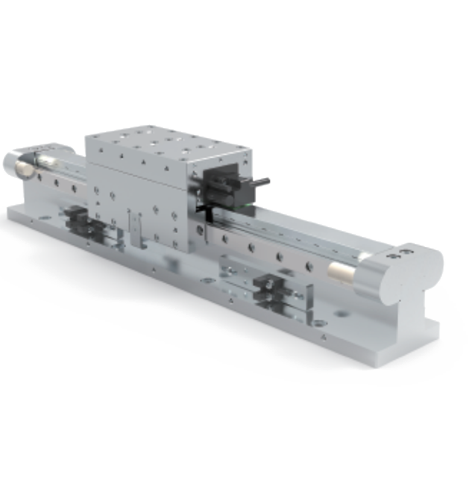
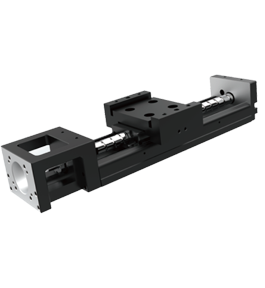
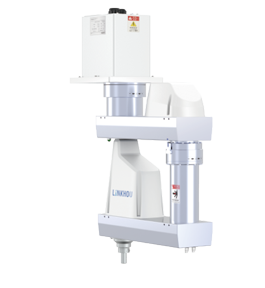
通过有限元分析,采用特殊的十字模组结构— 获得高刚度低质量设计方案
根据优化的结构,开发高性能的型材,降低运动重量— 提高结构强度
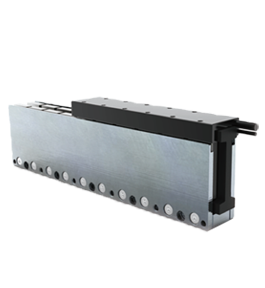
根据电机的结构,进行电磁干扰性仿真,— 确定两电机的安装尺寸