灵猴机械手与欧姆龙PLC的EIP通讯
2023/04/28
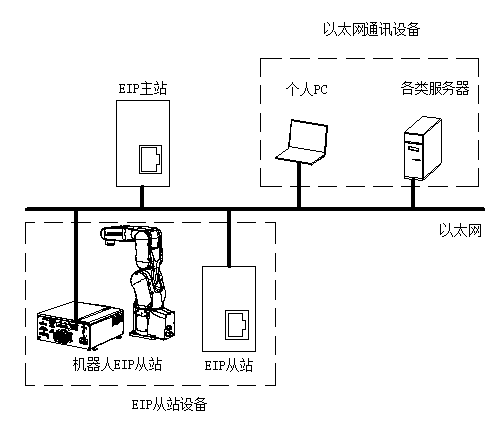
EIP(EtherNet/IP)通讯是一种基于开放式以太网的工业网络系统,可在不同厂家EtherNet/IP设备之间实现通讯。EIP在物理层和数据链路层采用了标准的以太网技术,在网络层和传输层使用IP协议和TCP、UDP协议来传输数据,EIP通讯网络中可以和以太网功共用一个物理网口,如图1所示:
图1 EIP通讯图示
EtherNet/IP网络包含两种通讯方式:
基于网络的总线IO通讯(脱离硬件扩展的IO通讯)。
数据的交互通讯(整型、浮点型报文通讯)。
灵猴工业机器人EIP通讯是基于EIP从站开发的,配置完相关设定后,EIP主站通过导入灵猴工业机器人EDS配置文件,定义好网络通讯节点地址(Input 100,Output150)后即可实现EIP主/从站通讯。
灵猴工业机器人EIP通讯具有以下特点:
(1)可以实现64位网络IO输入,64位网络IO输出,如图2所示:
图2 EIP总线IO
当仅使用 EIP 扩展模块且没有硬件扩展IO模块时,EIP I/O 起始地为16,当扩展了硬件扩展 I/O后,则EIP I/O 起始地址从硬件扩展 I/O地址之后开始。例如添加了一个扩展输入模块和 2 个 EIP输入模块,则 IN0~IN15 为控制器标准输入,IN16~IN31 为硬件扩展输入,IN32~IN63 为 EIP输入。
(2)灵猴工业机器人EIP数据交互支持short int 型和float型两种数据格式,具有123个输入寄存器和123输出寄存器,每个寄存器占用2个字节。EIP总线数据输出映射至输入寄存器 304~427,总线数据输入映射至保持寄存器 5304~5427,如图3所示:
图3 EIP数据交互寄存器地址
(3)灵猴工业机器人通过以下指令来实现EIP数据的交互。
WriteInputRegAsFloat( Addr, Data)
以浮点型向输入寄存器中写入数据
ReadHoldingRegAsFloat ( Addr )
读取保持寄存器中的浮点型数据
MBWriteInputReg ( Addr, Data )
向输入寄存器中写入整型数据
MBReadHoldingReg ( Addr )
读取保持寄存器中的整型数据
MappingInputReg ( Target, Source, Length )
将源输入寄存器中的数据映射到目标地址上
在工业应用中,灵猴工业机器人和PLC多采用EIP通讯进行信号交互或数据交互,不仅可以减少现场接线、布线的工作量,PLC或工业机器人的编程也会相对变得简单。因EIP通讯的可靠性和便利性,在客户方案前期阶段,我们会优先推荐客户采用EIP通讯的方式。
操作实例
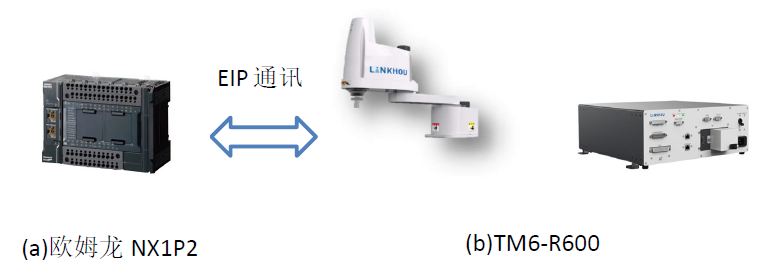
下面以欧姆龙NX1P2型PLC做EIP主站,灵猴工业机器人TM6-R600做EIP从站为例,来介绍EIP通讯的配置和操作实例,如图4所示。在进行工业机器人和PLC配置前,需要将调试电脑、PLC、灵猴工业机器人的IP地址设置在同一个网段上。
图4 欧姆龙PLC和灵猴机器人
一:灵猴TM6-R600工业机器人EIP通讯的相关设定步骤:
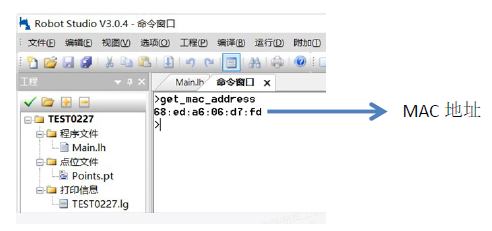
1、新建工程,在命令【窗口】中获取灵猴机器人控制器的MAC地址,将MAC地址提供给灵猴技术人员,生成EIP激活码,如图5所示:
图5 MAC地址的获取
2、在工程文件的【选项配置】中,输入灵猴技术人员提供的EIP密钥,如图6所示:
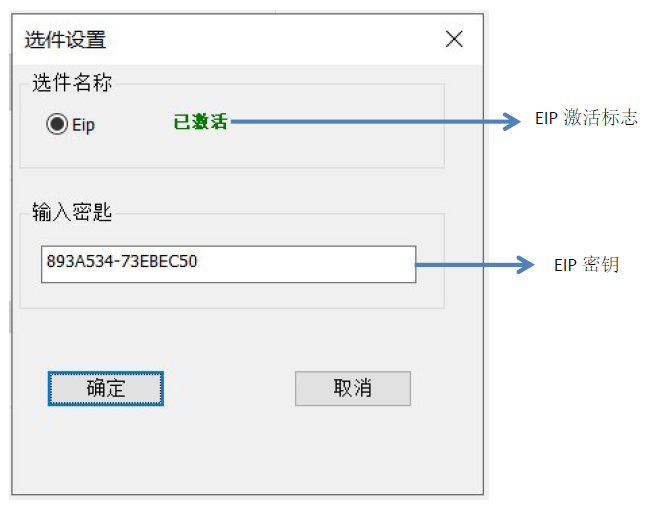
图6 EIP密钥的输入
3、设置灵猴工业机器人EIP的IO模块个数,设置完成后重启控制器,如图7所示:
图7 设置EIP扩展IO模块数量
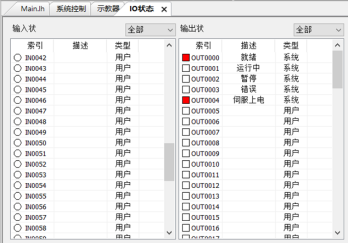
4、连接机器人,监控IO状态,IN16~IN79和OUT16~OUT79为添加EIP后的总线IO,可以实现和普通IO一样的功能,如图8所示:
图8 IO状态监控
二:欧姆龙PLC的EIP通讯相关设定。
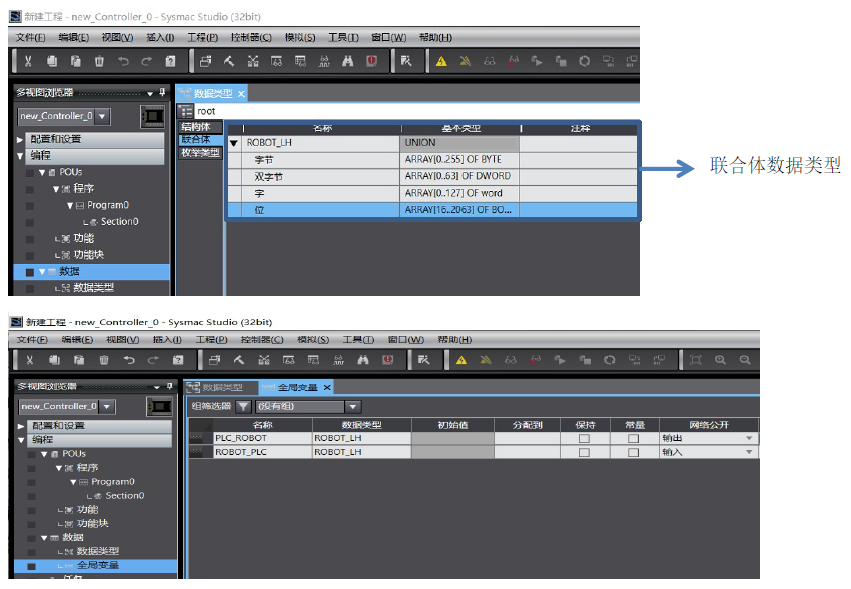
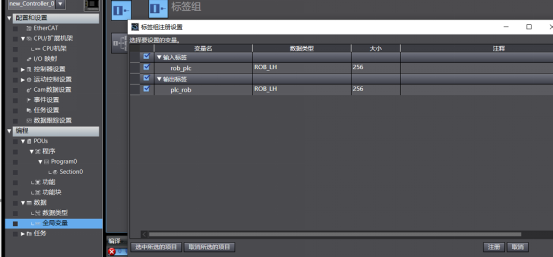
1、新建PLC工程,设置PLC的数据类型和全局变量,如图9所示:
图9 设置PLC数据类型和全局变量
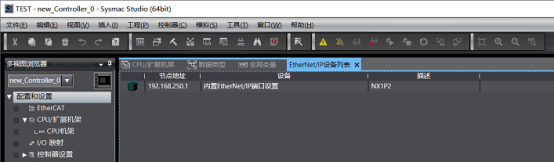
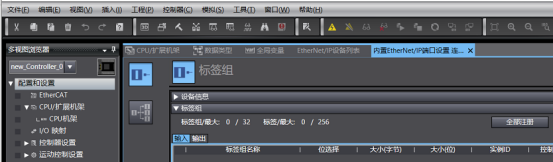
2、在【工具】---【Ethernet/IP连接设置(N)】中配置PLC的EIP参数,如图10所示。
(a)打开EIP配置列表,显示连接的PLC
(b)点击【全部注册】,注册全部变量
(c)点击【注册】,完成标签组件注册设置
图10 PLC的EIP通讯设置
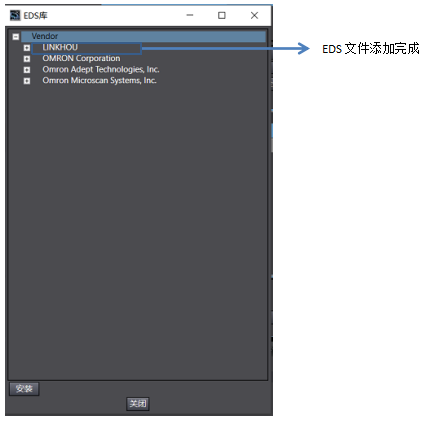
3、导入灵猴工业机器人EIP通讯的EDS文件,如图11所示:
(a)添加灵猴工业机器人EIP通讯的EDS文件
(b)在PLC的EDS文件库出现LINKHOU ,安装EDS完成
图11 PLC添加灵猴机器人EDS文件
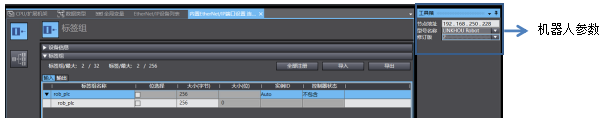
4.PLC软件中添加灵猴机器人,如图12所示:
(a)在PLC【工具箱】里添加机器人IP地址、型号名称、修订版本;
(b)在PLC【工具箱】里出现灵猴机器人的图标,添加机器人完成。
图12 PLC添加灵猴机器人
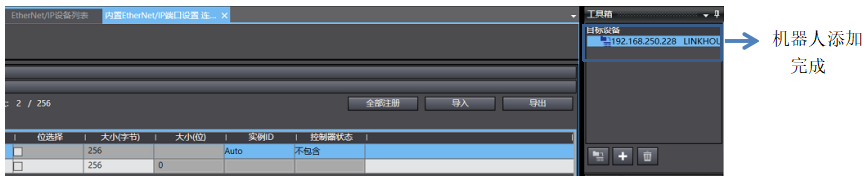
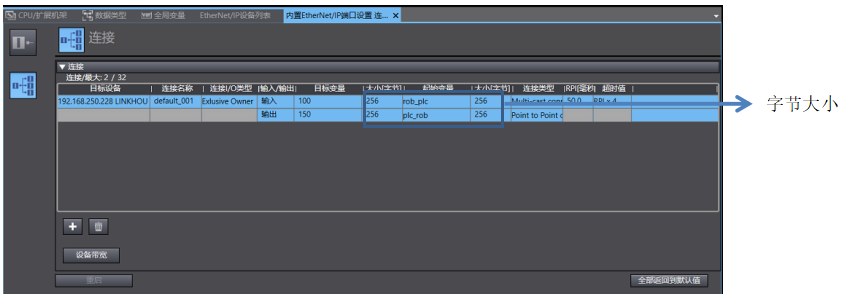
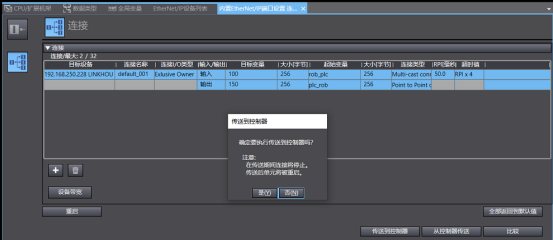
5.PLC软件中添加EIP通讯的网络节点及相关参数,并传送到PLC完成连接,如图13所示:
(a)添加输入输出节点
(b)设置字节大小等其它参数
(c)传送到PLC
(d)EIP连接完成后控制器状态
图13 PLC和工业机器人EIP完成连接
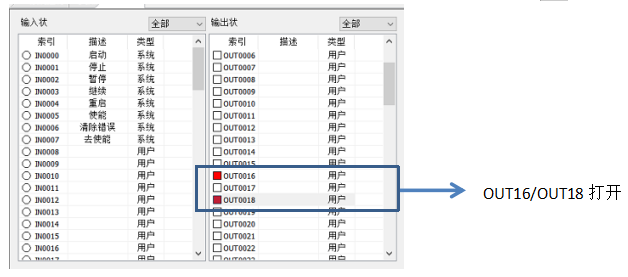
三:EIP网络IO通讯的测试,以工业机器人打开输出,PLC接到输入信号为例。
(1)灵猴工业机器人IO测试操作,如图14所示:
图14 打开灵猴工业机器人IO输出
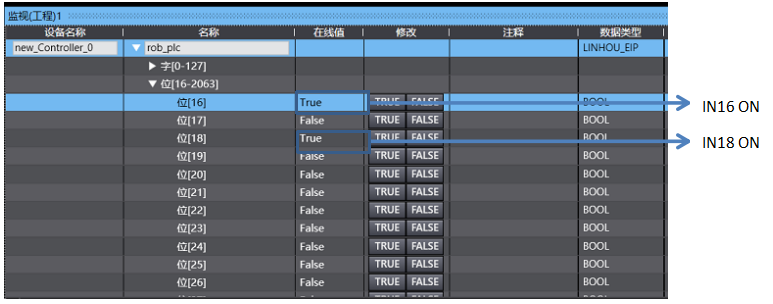
(2)欧姆龙PLC接收输入信号测试,如图15所示:
图15 PLC接收到输入信号
通过灵猴工业机器人和PLC的EIP配置及信号交互,可以了解EIP的主/从站配置流程及使用,让我们对机械手的EIP通讯有个初步的认识,便后后续工作中使用。
总结
EIP通讯具有高速、稳定的数据传输特点,在工厂自动化控制、楼宇自动化和程序自动化等场景中具有广泛的应用,作为网络IO使用时可以减少硬件的接线、布线,提高现场维护和升级的效率,且操作方便可靠性高。目前市场上绝大多数工业机器人均开发了EIP通讯,以方便工业机器人和外部设备的控制和通信。
灵猴工业机器人引领国产机器人的科技潮流,在网络通讯方面开发了EIP、Modbus/TCP、Modbus/Rtu、CC-LINK、TCP/IP等主流通讯方式,给客户端更多的技术选择,适用于各种自动化控制工业网络。同时灵猴工业机器人还可以为客户定制不同的工业控制网络通讯需求,以一切为了客户服务、满足客户需求为宗旨,为工业4.0和国产机器人的壮大崛起而奋力前行。








 联系我们
联系我们 官方微信
官方微信 QQ客服
QQ客服 新浪微博
新浪微博