灵猴

在机器人实际作业过程中,其末端负载会随着工艺要求的改变而随之发生变化,如果控制系统不及时对负载产生的重力矩和惯性力矩进行补偿,机器人运动精度会有偏差、动态性能将会降低,甚至在某些位姿下导致负载和连杆的谐振。因此快速准确识别负载动力学参数是实现机器人高精度控制的关键之一。

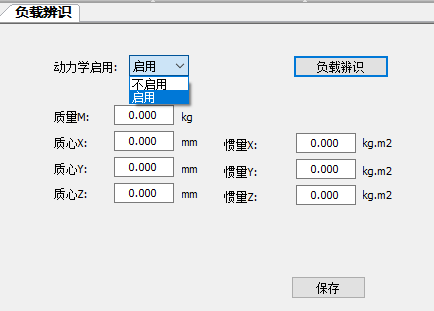
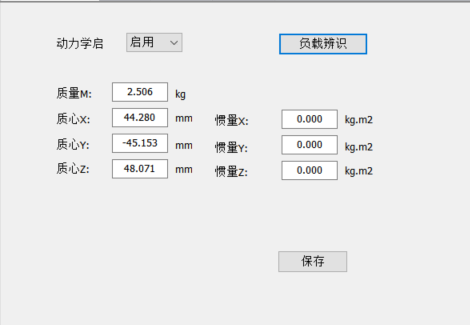
灵猴机器人自主开发了自动识别负载方式,可对复杂工具进行自动重量、重心的检测识别,以保证在满载情况下高速运行的稳定性。
1).负载辨识:主要是检测机器人末端负载,以及重心位置;目的是为解决机器人在高速运动过程中,避免由于末端受到不同负载的影响,从而带来控制精度降低的问题。
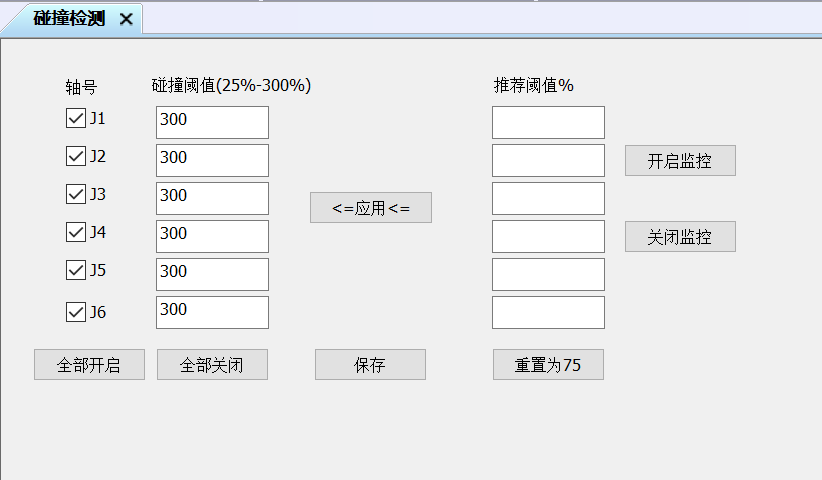
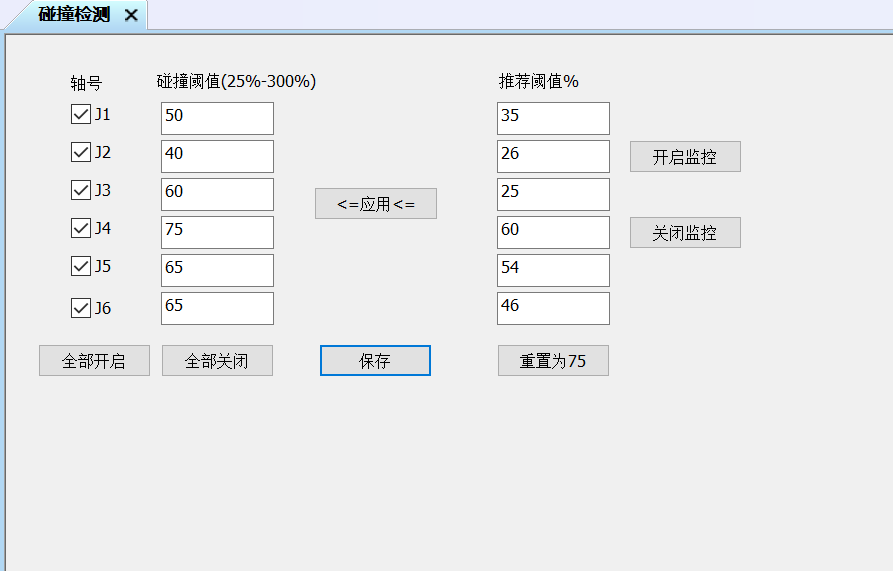
碰撞检测
1).碰撞检测:主要用于检测机器人和臂前端的工具与外围设备的碰撞,并紧急停止机器人,以减少碰撞造成的损害的功能。

 联系我们
联系我们 官方微信
官方微信 QQ客服
QQ客服 新浪微博
新浪微博